属山地高原地形,山地面积占全省总面积的88.64%
特殊的地形地貌造就了多样的旖旎风光
然而
这样的地貌曾让电力施工人员叫苦不迭
喊话都能听见的两基塔,因中间隔了条深谷
辗转去到对面可能要走一天时间
在高海拔地区的电力巡线工作
一个难字,都难以形容


如今,在科技创新的驱动下,更高效、更安全、更智能的无人机已经开启了高海拔地区输电线路数字化、巡检智能化、运维科技化的时代。
同时,也展现了云计算、大数据、移动应用为代表的信息技术与生产性服务业的融合发展的新形态。
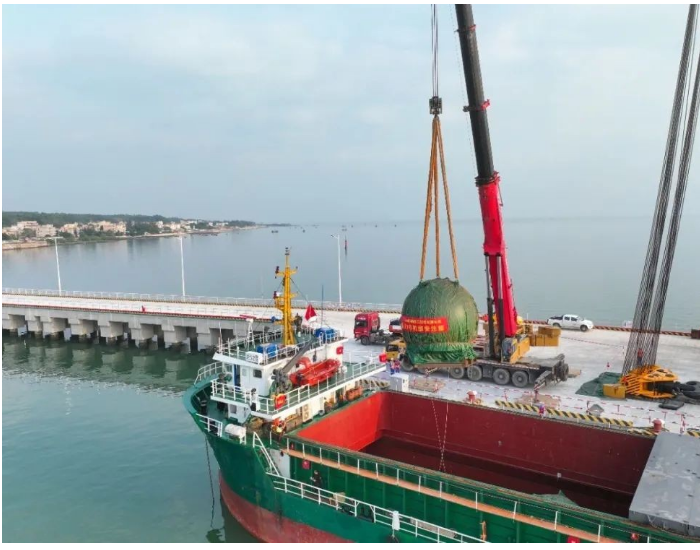
近日,南方电网云南电网公司在怒江成功开展无人机自主巡检输电线路,这是国内高海拔复杂环境下的首次作业,将有效促进解放和发展社会生产力。戳视频???
巡检路上的历代“神器”
人工巡线

曾经电力工人放线时,要拖着牵引绳上高山下深谷,甚至横渡激流,耗时耗力且险象环生,工作效率低,生态环境破坏严重。

2003年,云南电网送变电工程公司首次将飞艇牵放初级导引绳的作业方法应用到施工中,开启了飞行器应用于电网建设作业的序幕,通过飞艇从空中把初级导引绳拖曳到竖立好的杆塔上,再通过导引绳将导线拉上塔,这一技术很大程度上规避了极端地形对施工放线的影响,工作效率大大提高。

直升机
云南电网超过80%以上的输电线路都散布在远离城镇、交通干线、人烟稀少的高山大岭地区,依靠传统的人工巡检,作业劳动强度大、工作条件艰苦、工作效率不高等问题凸显,难以满足巡检需求。

2006年起,云南电网开始采用直升机巡检输电线路,不断提高巡检覆盖面,到2015年实现了500千伏输电线路直升机巡视全覆盖,有力保障了电网安全稳定运行。然而,全省还有近5.5万千米110千伏及以上电网线路由人工巡检,日常巡视人员数千人。
“无人机巡检是人工巡检有力助手,它能轻松完成很多人工巡检的大难题,同时也是对直升机巡检方式的有力补充。”怒江供电局输电管理所线路工王培继说,以前人工巡查线路,遇上难走的路段一基杆塔就可能耗费4-5个小时,效率非常低,用上无人机之后可能只需要10分钟就能无成,工作效率大大提高了。

为解决直升机巡检难以覆盖110千伏及以下电压等级输电线路的巡视工作,降低直升机巡检作业的成本,云南电网公司不断加大直升机巡检业务推广和无人机巡检研发应用,逐步向“机巡为主、人巡为辅”的巡检模式过渡,有效承接南方电网公司发展规划和电网运营规划要求,推动无人机在电力领域领域创新驱动发展。
遥控直升机

随着绿色环保施工的推广,遥控直升机替代飞艇成为更安全、高效、环保、经济的放线“利器”。
遥控直升机带线起飞后在杆塔上方悬停,作业人员取下牵引绳施放导线,用于施工放线的遥控直升机能挂重8千克,抗5级风,飞行高度达250米,续航45分钟,适应天气状况能力和机动性较飞艇更强,且直升机长1.75米,仅重7.5千克,携带方便。
多轴飞行器

2014年,性能更强大的多轴飞行器开始展露头脚。多轴飞行器飞行稳定性极佳,在高空的抗风能力强于遥控直升机,能更好应对施工现场各种气象条件,飞行器采用电池驱动,相对遥控直升机的“燃油”更经济环保,折叠后可装入半米大小的方箱中,携带更方便,从箱中取出10分钟内就能展开升空。
升级!
人工智能,无人机实现自主巡检

为什么要开展无人机自主巡线作业?
无人机自主巡线作业,是为了解决高海拔地区复杂环境无人机应用的瓶颈,节省人力资源,把控风险,通过利用云计算、大数据、物联网、移动应用等现代技术手段,实现无人机对输电线路自动巡检。
从2017年开始,我们利用云计算、大数据、物联网、移动应用等现代技术手段,研究三维航线自动规划系统及基于旋翼和固定翼无人机的自动驾驶系统,满足不同电压等级、复杂地形条件下的日常和特殊巡检。”据黄俊波介绍,从多旋翼无人机智能巡航方面着手,应用RTK差分定位、航迹自动规划、自动控制、导航定位等技术实现对输电线路安全快速的沿导线自动巡检。
以前人工巡查线路,遇上难走的路段一基杆塔就可能耗费4-5个小时,效率非常低,用上无人机之后可能只需要10分钟就能完成,工作效率大大提高了。

无人机自主巡检
优势
这将有效促进解放和发展社会生产力,推动电网运行维护转型升级,极大地减少人员劳动强度,提高工作效率。
省时 省力
精准发现问题
减少劳动强度
提高劳动效率
三维航线规划是如何开展的?

三维航线规划方面,基于云南电网现有输电激光点云数据和线路、杆塔模型数据,使用点云滤波算法对原始点云进行分类,把杆塔以及周围区域单独切分出来,使用三维点云关键点提取算法,标记杆塔上的部件,选择位置、相序等信息,使用航线规划算法,打开某一基杆塔,输入拍摄角度和拍摄距离后自动生成初始航线,生成完成后,可以针对每一个航点单独编,可以增加删除航点,最后可以对塔内航线进行三维动态预览。设计完成后,选择导出航线的杆塔,进行三维航线预览,把杆塔加载在地图背景上,并把航线路径进行叠加,直观查看整条航线的情况,如果发现问题可以回到设计步骤进行航线修改。
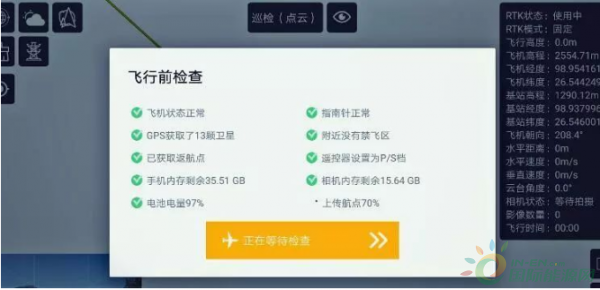
飞行控制方面,通过无人机的飞行控制接口,设计出无人机飞行控制软件,保持飞行姿态与航迹的稳定,按照自动规划的航线和指令要求改变飞行姿态与航迹,实现无人机在规划设定的自动驾驶巡检的区域内,可进行定位并多角度拍摄执行巡检任务,实现无人机自主飞行、飞行状态监测、数据自动采集、AI实时识别、任务管理、飞行记录等任务,有效规避传统数据采集一次性投资大、巡检成本高、安全风大等问题。
“无人机自动巡检作业有效地推动电网运行维护转型升级,这个项目研究取得三维航线规划软件、自主驾驶软件各一套,申请专利6项。”方明说,下一步将在云南电网范围内建立全省无人机自主巡视三维航线库,一线作业班组可以直接下载三维航线,通过自主驾驶APP实现无人机自主巡视,为一线班组减负。